近日,我校電氣與控制工程學院何舟教授團隊在機器人領域國際頂尖期刊《IEEE Robotics and Automation Letter》上發表題為“Optimal Path Planning for Multi-Robot Systems Using Petri Nets”的論文,為解決多機器人系統路徑規劃中的計算復雜度和實時性問題提供了新的解決方案。陜西科技大學何舟教授為該論文第一作者,電控學院研究生袁世龍為第二作者,陜西科技大學為第一通訊單位。
多機器人系統包括無人地面車輛和無人飛行器,已在搜救、巡檢、物流運輸等領域得到廣泛應用。作為?智能無人系統?的核心技術,其路徑規劃能力直接決定系統能否適應復雜動態環境,是衡量系統自動化水平的關鍵指標之一。然而,現有方法在處理復雜邏輯任務和大規模系統時常面臨計算復雜度高和實時性較差等問題。

圖1 離線計算-在線規劃的算法整體框架
針對上述難點,本研究團隊提出了一種基于Petri網的多機器人系統最優路徑規劃方法。通過將多機器人系統抽象為圖形化的Petri網模型,并設計結構控制器,實現復雜任務約束的形式化表征。為避免機器人數量增加而引發狀態爆炸問題,提出一種狀態空間壓縮方法和高效的實時在線規劃算法,實現多機器人復雜任務的實時分配和最優路徑規劃。理論分析與數值實驗均表明,該方法在保證規劃最優性的同時,顯著提升了計算效率和可擴展性,尤其在機器人數量和環境規模不斷增加的情況下,表現出優于現有方法的性能。
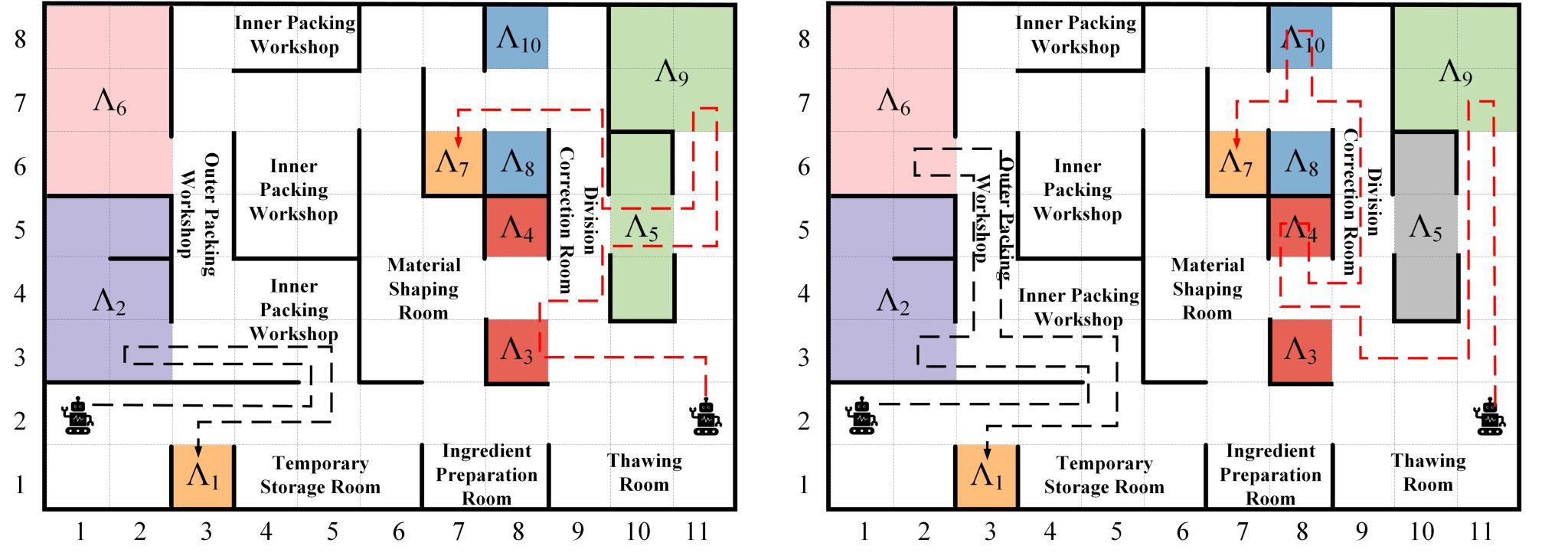
圖2 某車間環境下的不同復雜任務仿真軌跡
原文鏈接:https://ieeexplore.ieee.org/document/11122643
(核稿:周強 編輯:趙誠)

 校友
校友 教工
教工 學生
學生